RoboSim: A Cooperative Robotic Simulator
The goal of the RoboSim project is to build a 3 dimensional, distributed environment for testing heterogeneous cooperative robotic applications prior to implementation on real robots.
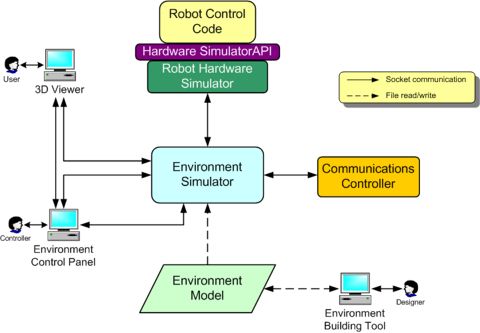
The architecture of RoboSim is shown below:
Professors
David Gustafson
Bill Hankley
Bill Hsu
Scott DeLoach
Students
Scott Harmon
Ryan Shelton
Aaron Chavez
Acharaporn (Ann) Pattaravanichanon
Arun Gansean
Balakumar Krishnamurthi
Esteban Guillen
Thomas Kavukat
Venkata Prashant Rapaka
Vikram Raman
Shravan Manda
Documents
RoboSim Users Manual (2005)
Control Panel (2004)
Environment Simulator (2004)
3D Viewer (2004)
Environment Redesign (2005)
Scout Robot Simulator
Communications (2004)
Pioneer Simulator (2005)
Geometry Module (2005)
Remote Control (2005)
Environment Building Tool (2004)

The initial RoboSim development team (2004).